https://doi.org/10.1007/s10845-024-02455-7
推動為移動式機器人都具備的基本能力,在夾具無法應用的情境中,推動便是一種移動式機器人重要的搬運策略。而推箱任務屬於移動式機器人搬運任務中的經典問題之一,任務的達成會與推動的預測模型、推動策略、和推動規劃有關。
本研究便是在探討差速式機器人在具有狹長通道的環境中,能否順利完成推動規劃,找出可行的推動路線。
窄口或狹長通道為實務環境中經常出現的空間特徵,像是:倉儲、病房...等室內環境,如何順利通過與機器人的規劃密不可分。然而多數的研究是依靠局部規劃,即時更新推動方向,並沒有在全域規劃時便考量換邊行為的可能性,因此導致推動的效率不佳,甚至可能因為缺乏全域規劃的路徑,使機器人將箱子推至死路,導致任務失敗。
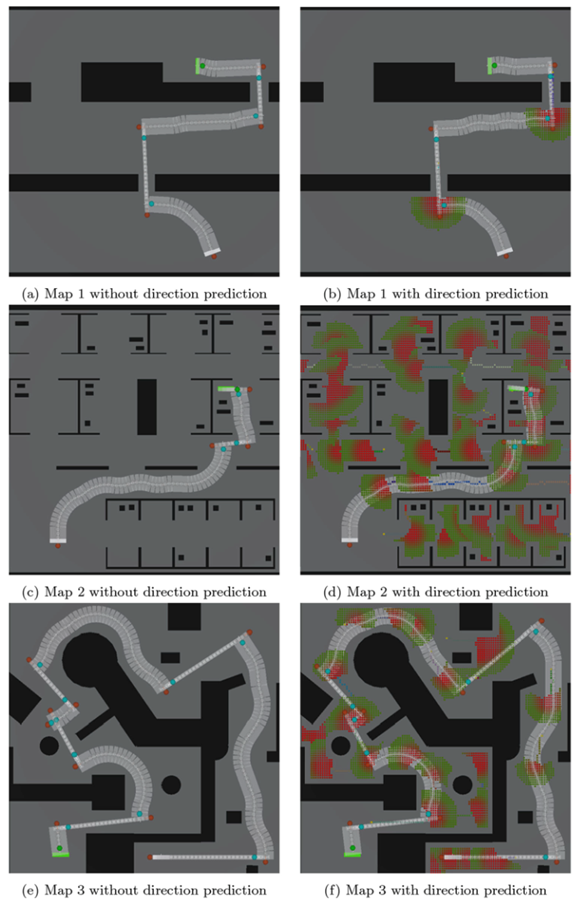
為解決此問題,本研究採取穩定推動(stable pushing)為推動策略,並提出一種基於 Hybrid A* 演算法的全域規劃方法解決差速式機器人在具有狹長通道的室內環境中,執行推箱時所面臨的換邊推動的規劃問題,我們透過修改 Hybrid A* 演算法,調整其節點的擴展方式,並加入朝向預測的機制,使其可以生成具有換邊行為的推動路徑。最後於模擬中證明,即使環境較為複雜,且具有數個狹長通道時,也能夠以修改後的演算法,作為全域規劃生成可行的推動路線,再藉由將任務切割成數個子任務,以有限狀態機在狀態間的重覆轉換完成子任務,使機器人完成推箱任務。透過修改 Hybrid A* 的節點擴展方式,並加入朝向預測的機制,此演算法能夠規劃出具有換邊行為的推動路線。(機械系詹魁元教授提供)
換邊推動策略
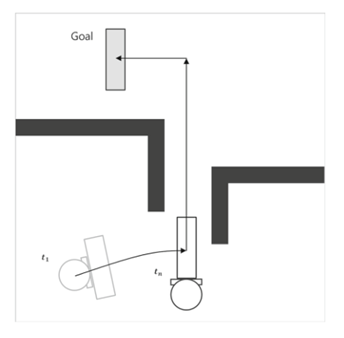
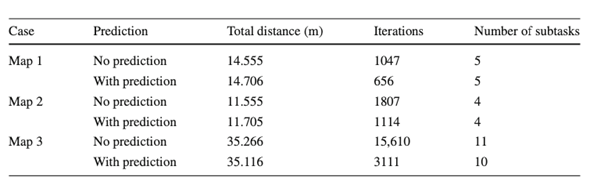
換邊推動提升效率並降低總行程
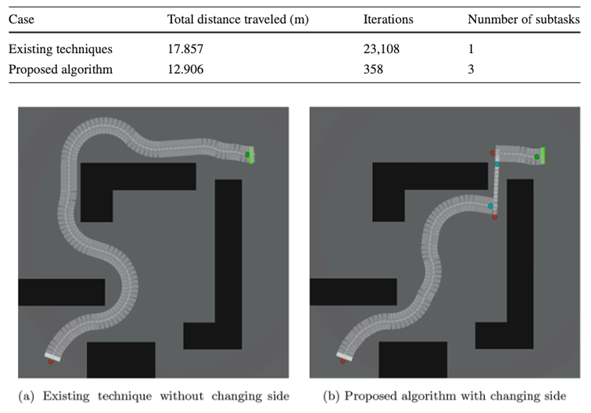
案例比較